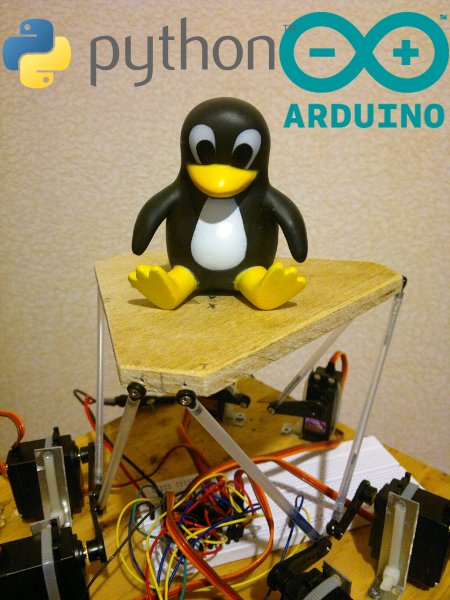
以前の投稿で、6度のスチュアートプラットフォームのモックアップを作成する見込みについて話しました。 そして、すべてのコンポーネントは遠い中国から来て、テーブルの上に組み立てられました、あなたは先に進むことができます!
ツールと材料
以前のレイアウトの開発は、Visual Studio 2008がインストールされたWindows 7オペレーティングシステムを搭載したラップトップを使用して実行され、すべてのプログラミングはMicrosoft .NET Frameworkライブラリを使用してC#で実行されました。
日常のタスクを実行および実行するためのメインマシンは、オペレーティングシステムUbuntu Linux 10.4がインストールされたデスクトップコンピューターであるため、ArduinoとPythonの相互作用をマスターすることになりました。 さまざまな環境のハードウェアの経験を身につけてみませんか?)
仕事には、次のツールと材料が必要です。
| 命名 | 数量 |
| Linuxインストール | 1個 |
| 6電源プラットフォーム | 1個 |
| Arduino Mega | 1個 |
| ブレッドボード | 1個 |
| スクリード | 6個 |
| サーボ | 6個 |
| コーナー | 6個 |
| ボールベアリング | 12個 |
| ヘリウムペン | 6個 |
| 接続線 | 20個 |
| ペンギン+スコッチ | 1個 |
| ジョイスティック | 1個 |
必要なソフトウェアから:
- Linux
- Arduino 0022
- Python
- アイパイソン
- パイガメ
- PySerial
- PyQt4
プラットフォームをまとめる
パラレルキネマティック接続に基づくさまざまな自由度を持つメカニズムの範囲は非常に広いです。
- 多軸フライス盤およびボール盤
- フライトシミュレーター
- オブジェクトを配置するための調整可能な関節式トラス
- レコーダーなど
このようなメカニズムの拡張性により、大型のユニットをベースに高速で簡単に構築できます。また、大きな設計加速を使用して、たとえば望遠鏡、レーザー、通信アンテナ、ジェットエンジンなどのさまざまな産業用ロボットまたはプラットフォームを作成します。
サーボでの作業の詳細な説明は、 3電源プラットフォームに関する私の記事で説明されています 。この場合、3つのドライブの代わりに6つが使用され、レイアウトはStuartプラットフォームに対応します。
危機的な状況で、または接続部分として負荷がかかっているときにプラットフォームを壊さないために、同僚(ミハイルに感謝します)は、ヘリウムペンの通常のロッドとヘリコプターのボールベアリングをドッキングノードとして使用することを提案しました。
組み立て後のプラットフォームの上面図:

サーボドライブは、それぞれArduino Megaの2〜7の出力からPWMを使用して制御されます。

内部では、プラットフォームの下で、ブレッドボード上で通常の方法でサーボが接続されています。

一般的なケースでは、3電力スキームに対してコンポーネントの数を単純に2倍にし、1つのかなり安定した設計にしました。 多くのテスト中、ジョイントから飛び出すのは単にうっとうしいため、ロッドのボールベアリングを接着剤で固定することが重要です。
6度
ウィキペディアによると、6つの自由度の概念には次の定義があります。
6自由度 (英語の6自由度の略語6DoFがよく使用されます)-(3次元)空間で幾何学的な動きをする幾何学的図形の能力を示します。すなわち、前方/後方、上下/左右(デカルト) 3次元座標系)、相互に垂直な3つの軸(ヨー、ピッチ、ロール)のそれぞれの周りの回転を含みます。 空間内の任意のベクトルに沿った変位は、各軸に沿った基本ベクトルに沿った3つの基本変位の合計として表すことができ、そのような各基本変位は他の2つから導出できないことが知られています。 空間内のフォームの任意の回転は、各軸の周りの一連の回転によっても指定できます(オイラーによる)。 したがって、番号6(6)。
グラフィカルに、この定義は次のように表示できます( ソース )

これに基づいて、6自由度は次のようになります。
- X軸直線変位
- Y軸線形オフセット
- Z軸直線変位
- X軸の周りの回転( roll -roll)
- y軸を中心に回転(ピッチ)
- y軸を中心に回転( ヨー -ヨー)
X軸を中心とした回転の例-容器のロール ( source ):
Y軸を中心とした回転の例-船舶のピッチ ( source ):

Z軸を中心とした回転の例-船のヨー ( ソース ):
インターネット上には、軸の周りの回転の程度を記述する多くの例があります 。ここにそれらの1つがあります 。
プログラミング
レイアウトを組み立て、3つのサーボの制御プログラムを変更した後、制御コマンドの形式は次のとおりです。

制御コマンドは、1バイトのコマンドプレフィックスで構成されています。この場合、シンボル「S」が使用され、ドライブの6つの位置、それぞれ2バイトです。 C言語を使用してこのようなコマンドを作成する方法はすぐにわかります。対応する形式の構造を宣言します。 Pythonの「バッテリーパック」には、一連のフィールドから文字列を形成するためのすばらしい構造体モジュールがあります。
structモジュールに関して上記で提示された構造は、次の形式を持ちます。
インポート 構造
struct pack ( '<chhhhhh' 、 'S' 、pos1、pos2、pos3、pos4、pos5、pos6 )
モジュールのドキュメントによると:
- <-は、変数の変換後の低から高へのバイト順を示します
- c-C言語のchar型(1バイト)の変数の長さが1文字のPythonストリングに一致します
- h-Python整数値をC言語の短い変数(2バイト)にマップします
すべての主要なテストはPython言語コンソールで実行できます。この場合、強力なIPythonツールを使用し、シリアルライブラリが必要なハードウェアに接続します。
プラットフォームへの接続は次のとおりです。
輸入シリアル
serialPort =シリアル。 シリアル ( '/ dev / ttyUSB0' 、 115200 )
serialPort。 オープン ( )
接続が成功した後にデータを送信し、ポートを開く手順は次のとおりです。
serialPort。 write ( struct。pack ( '<chhhhhh' 、 'S' 、x、y、z、roll、pitch、yaw ) )
このコードは、ジョイスティックを使用したプラットフォーム管理プログラムと同様に、プラットフォームのテスト手順の基礎を形成します。
次の簡単なPythonプロシージャを使用して、すべての自由度を自動的にテストできます。
- インポート 構造
- 輸入 時間
- インポート 数学
- def send_data (シリアル、x、y、z、ロール、ピッチ、ヨー) :
- シリアル write ( struct。pack ( '<chhhhhh' 、 'S' 、x、y、z、roll、pitch、yaw ) )
- def complex_test (シリアル、長さ= 200 、回数= 1000 、デルタ= 0.05 、一時停止= 0.7 ) :
- test_linear (シリアル、長さ、時間、デルタ)
- 時間 。 スリープ (一時停止)
- test_yaw (シリアル、長さ、時間、デルタ)
- 時間 。 スリープ (一時停止)
- test_angles (シリアル、長さ、時間、デルタ)
- 時間 。 スリープ (一時停止)
- def test_linear (シリアル、長さ= 200 、回数= 1000 、デルタ= 0.05 ) :
- xrange ( 1 、times、 5 )の角度の場合:
- a =角度* 数学 。 pi / 180
- send_data ( serial、 int ( lenght * math。cos ( a ) ) 、 int ( lenght * math。sin ( a ) ) 、0、0、0、0 )
- 時間 。 スリープ (デルタ)
- send_data (シリアル、0、0、0、0、0、0 )
- def test_angles (シリアル、長さ= 200 、回数= 1000 、デルタ= 0.05 ) :
- xrange ( 1 、times、 5 )の角度の場合:
- a =角度* 数学 。 pi / 180
- send_data ( 0、0、0、0、 int ( 30 * math。cos ( a ) ) 、 int ( 30 * math。sin ( -a ) ) )
- 時間 。 スリープ (デルタ)
- send_data (シリアル、0、0、0、0、0、0 )
- def test_yaw (シリアル、長さ= 200 、回数= 1000 、デルタ= 0.05 ) :
- xrange ( 1 、times、 5 )の角度の場合:
- a =角度* 数学 。 pi / 180
- send_data ( serial、 int ( lenght * math。cos ( a ) ) 、 0、0 、 int ( 30 * math。sin ( a ) ) 、 0、0 )
- 時間 。 スリープ (デルタ)
- send_data (シリアル、0、0、0、0、0、0 )
ジョイスティック制御
「プレジャースティック」から値を取得する最も簡単な方法は、PyGameモジュールを使用することです。 このモジュールはSDLに基づいており、Pythonでおもちゃを開発するための多くの便利なツールがあり、ゲームコントローラーを操作するためのツールも含まれています。

ジョイスティックを初期化し、座標を取得する簡単な例:
pygameをインポートする
#値のスケール
スケール= 1000
#Pygameの初期化、ジョイスティックの初期化機能が自動的に実行されます
pygame。 初期化 ( )
#利用可能なデバイスの取得
範囲内の jid ( pygame。joystick。get_count ( ) ) :
自己 。 joysticksComboBox 。 addItem ( u '%d%s' % ( jid、pygame。joystick。Joystick ( jid ) 。get_name ( ) ) ))
#ジョイスティックオブジェクトを初期化する
self ._joystick = pygame。 ジョイスティック 。 ジョイスティック ( self。JoysticksComboBox。CurrentIndex ( ) )
#pygameでイベントを更新する
pygame。 イベント ポンプ ( )
#特定の軸(この場合、軸X = 0)のジョイスティックから位置を取得します
#値は-1から1としてfloatとして返されるため、スケールします
self ._joystick。 get_axis ( 0 ) *スケール
ジョイスティックを使用したプラットフォーム管理プログラムには、PyQt4ライブラリのおかげでグラフィカルインターフェイスがありますが、当初は(ほとんど実装されていた)cursesで作成したいという熱望がありました。 ジョイスティックが接続され、ボードを操作するためのポートが開いている場合、タイマーに従って、33 ms間隔後のデータがゲームコントローラから受信され、ボードに転送されます。
管理プログラムインターフェイス:

注:ジョイスティックは安価であるため、多くのデッドゾーンと不快な感度があり、プラットフォームが「高速」サーバー上にあるため、ジョイスティックのジャムがすぐに見えるように予約したいだけです。
プログラムをテストした結果、次のビデオが判明しました。
結論
作業の結果、次の結果を達成しました。
- プログラミング環境の展開に問題はなく、ボードはすぐにカーネルに引き継がれたため、LinuxオペレーティングシステムのArduinoでの作業をマスターしました(Windowsでは、FTDIドライバーが必要です)。
- Python言語ツールを使用してRS232を操作する方法と、ハードウェアを管理する方法を学びました。 この経験により、不要なコードを開発することなく、コンソールから簡単に交換プロトコルをボードでテストできます。その後、このプロトコルをRS232で動作する既製のソリューションに組み込むことができます。
- PyGameを使用してコントローラーを操作する方法を学びましたが、難しくはありませんが、初心者には役立ちます。
将来の主な問題、あなたのコメントがしばしば役立つ解決策:
- プラットフォームの動きの線形歪みを減らすために正確な回転角を計算することはできないため、サーボの使用は避けたいと思います。いずれにしても、リニアアクチュエータ(アクチュエータ)が必要です。 既存のもののうち、Frigelli L12しか見つかりませんでしたが、非常に遅いです。別のオプションはボールねじを使用することですが、まったく利用できませんでした。
- パワーユニットが変更された場合、新しいボールベアリングを探す必要があります。現在使用されているボールベアリングは小さすぎて、異なるスケールで問題を解決できません。
- 産業用オートメーションのアクチュエータからのフィードバック方法は、PIDコントローラーを備えたセンサーによって解決されますが、小規模では問題であることが判明しました。
PS:私はこの分野の革新者ではありません。提案や批判を歓迎します。