画像のセグメンテーション
画像処理と分析の主なタスクの1つはセグメンテーションです。 画像を特定の均一性基準を満たす領域に分割します。たとえば、画像上でほぼ同じ明るさの領域を強調表示します。 画像領域の概念は、特定の共通の属性(プロパティ)を持つ画像要素の接続グループを決定するために使用されます。
主な簡単な方法の1つは、しきい値を使用してセグメンテーションを構築することです。 しきい値は、目的の信号をクラスに分割するのに役立つ記号(プロパティ)です。 しきい値分離の操作は、画像内の各ピクセルの輝度値を指定されたしきい値と比較することです。

二値化
2値画像を生成するしきい値分離の操作は、2値化と呼ばれます。 二値化操作の目的は、画像に含まれる情報の量を大幅に減らすことです。 2値化のプロセスでは、特定の数の輝度レベルを持つ元のグレースケール画像が白黒画像に変換され、そのピクセルは2つの値(0と1)のみを持ちます。
しきい値画像処理は、さまざまな方法で実行できます。
より低いしきい値での二値化
より低いしきい値での二値化
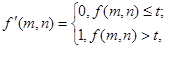
より低いしきい値を使用した2値化は最も単純な操作であり、1つのしきい値のみが使用されます。

基準の代わりにすべての値が1になり、この場合255(白)と、しきい値t-0(黒)より大きいピクセルのすべての値(振幅)になります。
上限しきい値の二値化
場合によっては、最初の方法の変形を使用して、2値化プロセスで得られたネガティブイメージを作成できます。 上限しきい値を使用した二値化操作:
ダブルリミット二値化
ピクセルの輝度値が既知の範囲で変化する可能性のある領域を強調表示するために、二重制限(t 1 <t 2 )を使用した2値化が導入されています。
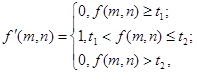
データの一部のみがスキップされる(ミドルパスフィルター)しきい値を持つ他のバリエーションも可能です。
不完全なしきい値処理
この変換により、元の画像に存在するすべての詳細を含む背景がなくなるため、さらに分析しやすい画像が得られます。

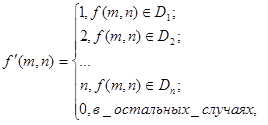
マルチレベルのしきい値変換
この操作により、バイナリではなく、異なる明るさのセグメントで構成される画像が生成されます。
二値化に関しては、基本的にそれだけです。 画像全体に使用されるグローバルなものと、画像の一部(画像)をキャプチャするローカルなものがあることを追加できます。
ローカルしきい値処理
Otsメソッド
この方法では、ラスターイメージのピクセル輝度値の分布のヒストグラムを使用します。 ヒストグラムは、値p i = n i / Nを使用して構築されます。ここで、Nは画像内のピクセルの総数、n iは輝度レベルiのピクセル数です。 輝度範囲は、輝度レベルkのしきい値を使用して2つのクラスに分割されます。kは0〜Lの整数値です。各クラスは相対周波数ω0ω1に対応します。

2つの画像クラスのそれぞれの平均レベル:
次に、2つの部分への画像分離の品質を評価するための最大値が計算されます。
ここで、( σcl )2 = ω0ω1 ( μ1-μ0 )2はクラス間分散であり、( σtotal )2は画像全体の合計分散です。

画像の輝度勾配に基づくしきい値の決定
分析された画像は、オブジェクトと背景の2つのクラスに分割できると仮定します。 しきい値計算アルゴリズムは、次の2つのステップで構成されます。
1.各ピクセルの輝度勾配のモジュラスが決定されます
画像

2.しきい値の計算:

ヒストグラムのエントロピーを使用する方法
このメソッドは、さまざまな形式の記述と可能なバリエーションを取得しています。 さまざまな法則と分布形式を使用した、一定量によるしきい値の総質量の分布。
グローバルしきい値処理
バーンセン法
1.奇数のピクセルを持つ通常の正方形の開口部は、元の画像のすべてのピクセルを一周期で通過します。 すべてのステップは最小と最大です。
2.平均値Avg =(Min + Max)/ 2が見つかります。
3.現在のピクセルがAvg <Eよりも大きい場合-白になり、それ以外の場合-黒になります。 E-ユーザーが指定した特定の定数。
4.平均がコントラストのしきい値よりも小さい場合、現在のピクセルは「疑わしいピクセルの色」パラメーターで指定された色になります。
これには多くの欠点があります:単調な輝度領域を処理した後、強いスプリアス干渉が形成され、場合によっては偽の黒い斑点の出現につながります
エイキル法
最も生産的な方法の1つはEikvelメソッドです。 鮮明でコントラストのある画像の処理によく使用されます。 この方法によれば、画像は2つの同心円ウィンドウ(small-S、およびlarge L)を使用して処理されます。通常、ウィンドウの形状は正方形であると想定されます。 両方のウィンドウは、画像上で左から右に上から下に重ねられます。ステップは小さなウィンドウSの側に等しくなります。ウィンドウLでは、ピクセルが2つのクラスターに分割されるようにしきい値Bが計算されます。 2つのクラスターの輝度レベルの数学的予想にユーザー定義レベル/μ1-μ2 /≥lを超える差がある場合、ウィンドウS内のすべてのピクセルはしきい値Tに従って2値化されます。それ以外の場合、ウィンドウSからのピクセルの輝度は値を閉じます。
ニブラック法
この方法の考え方は、局所標準偏差に基づいて、2値化の輝度しきい値Bをポイントごとに変えることです。 ポイント(x、y)の明るさのしきい値は、次のように計算されます。

ここで、μ(x、y)は平均であり、s(x、y)は点の近傍のサンプルの標準偏差です。 近傍のサイズは最小限にする必要がありますが、画像のローカルの詳細を保持するためなどです。 同時に、サイズは、結果に対するノイズの影響を減らすのに十分な大きさでなければなりません。 kの値は、オブジェクトの境界のどの部分をオブジェクト自体とするかを決定します。 k = -0.2の値は、オブジェクトが黒で表示されている場合はオブジェクトのかなり良好な分離を定義し、オブジェクトが白で表示されている場合はk = + 0.2の値を定義します。
ヤノヴィッツとブルックスタインの方法
輝度勾配の局所的最大化に基づくポテンシャルサーフェスは、2値化のしきい値サーフェスとして使用されます。 輝度勾配の始まりは、多くの場合、SobelまたはCannyループ演算子を使用して計算されます。 画像は、1ピクセルの太さの等高線を取得するためにフィルタリングされ、3×3の平均化フィルターが適用されます。 潜在的な表面は、現在、反復補間スキームに従って構築されています。 表面の計算は、アウトラインピクセルから順番に行われます。 各非輪郭ピクセルについて、補間残差R(x、y)が計算され、ステップn + 1での新しいピクセル値P(x、y)は次の式に従って計算されます。

高速収束のための1≤β≤2内のβ。
合計
喜んでそれを見つけました。将来、うまくいき、時間があれば、いくつかのアルゴリズムを実装しようとします。 これは、今日存在するすべてのほんの一部にすぎませんが、私はこれを共有できることを嬉しく思います。
ご清聴ありがとうございました。