手元にある最も単純なロボット
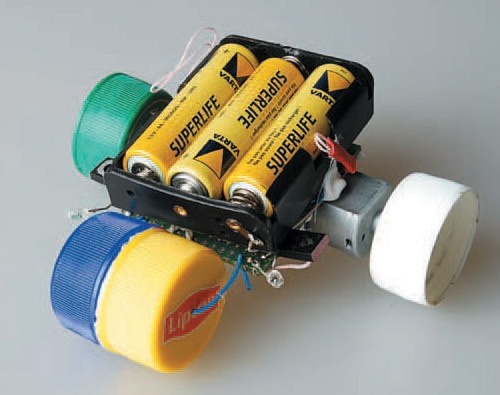
シンプルなロボット
コンピューター技術に出会った私たちの多くは、自分のロボットを組み立てることを夢見ていました。 たとえば、このデバイスで家事を実行するには、ビールが必要です。 誰もがすぐに最も複雑なロボットの作成を引き受けますが、多くの場合、結果はすぐに途切れます。 私たちはチップの策略を行うはずだった最初のロボットを思い浮かべませんでした。 したがって、単純で徐々に複雑化する獣から始める必要があります。 ここで、すべての家が持つ即興の意味から、アパート内を独立して移動する単純なロボットを作成できることを説明します。
コンセプト
私たちは簡単なタスクを設定し、即興の手段から15分でロボットを作成しました。 今後は、もちろん15分間は管理しませんでしたが、もっと長い期間管理しました。 しかし、それでも1晩でできます。
通常、そのような工芸品は長年にわたって行われます。 人々は数か月間、適切なギアを求めて店を駆け回っています。 しかし、すぐに気付きました-これは私たちの方法ではありません! したがって、設計時に、手元で簡単に見つけることができる、または古い機器からアップルートできるような部品を使用します。 最後の手段として、任意のラジオ店または市場で小銭を購入します。
もう1つのアイデアは、可能な限りコストを削減することでした。 電気店での同様のロボットコストは800〜1500ルーブルです。 それは部品の形で販売されているものですが、それでも組み立てられなければならず、その後も機能するという事実ではありません。 そのようなキットの製造業者は、ある種の詳細を入れることを忘れがちであり、それだけです-ロボットはお金とともに失われます! なぜそんな幸せが必要なのでしょうか? 私たちのロボットは、エンジンとバッテリーを含めて、100〜150ルーブル以下でなければなりません。 同時に、古い子供の車からモーターを取り出すと、その価格は一般に約20〜30ルーブルになります! すばらしい友人を獲得しながら、節約を感じてください。
次の部分は、私たちのハンサムな男がやることだ。 光源を探すロボットを作ることにしました。 光源が回転すると、私たちの機械はそれを操縦します。 この概念は、生きようとするロボットと呼ばれています。 彼はバッテリーを太陽電池に交換することができ、それから彼は運転する光を探します。
必要な部品とツール
子供を作るには何が必要ですか? この概念が利用可能であるため、回路基板、または通常の厚手の段ボールさえ必要になります。 段ボールには、すべての部品を取り付けるための突き錐で穴を開けることができます。 モンタージュは手元にあったので使用しますが、日中は火事で私の家に段ボールはありません。 これが、ロボットハーネスの残りの部分、モーター、センサーの取り付けを行うシャーシになります。 駆動力として、古いマシンから取り出すことができる3ボルトまたは5ボルトのモーターを使用します。 ソサソルなどのペットボトルのキャップからホイールを作成します。

いくつかのソース
センサーとして、3ボルトのフォトトランジスターまたはフォトダイオードが使用されます。 古いオプトメカニカルマウスから選択することもできます。 その中に赤外線センサーがあります(この場合は黒でした)。 ペアになっています。つまり、1つのボトルに2つのフォトセルがあります。 テスターでは、どの脚が何に向けられているかを判断するのを妨げるものは何もありません。 私たちの国の制御要素は816Gトランジスタになります。 電源として、3本の指タイプのバッテリーをはんだ付けします。 または、以前のマシンからバッテリーコンパートメントを取り出すこともできます。 インストールには、配線が必要です。 これらの目的のためには、ツイストペア線が理想的であり、自尊心のあるハッカーの家ではそれを山積みする必要があります。 すべての部品を固定するには、サーマルガンでホットメルト接着剤を使用すると便利です。 この素晴らしい発明は、すぐに溶けて同じようにすばやくつかむので、すばやく作業して気取らない要素を取り付けることができます。 この作品はそのような工芸品に理想的であり、私の記事で何度も使用しています。 硬いワイヤも必要です。通常の事務用クリップが非常に適しています。
回路を取り付ける
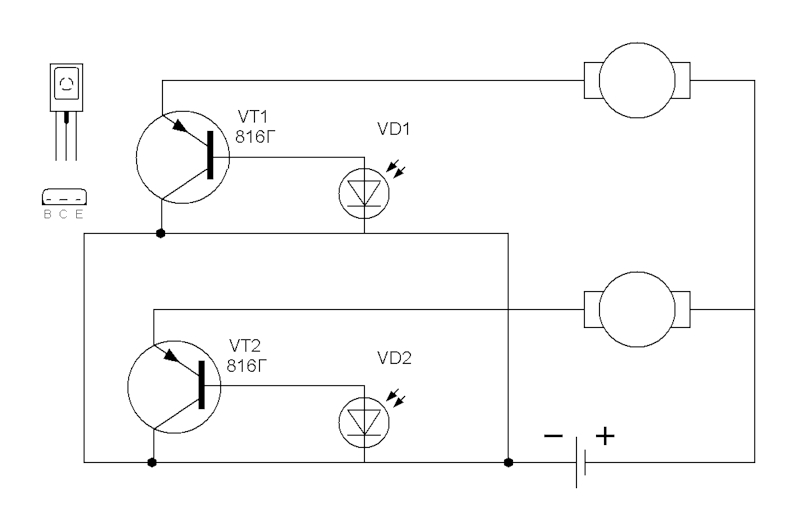
ロボットの模式図
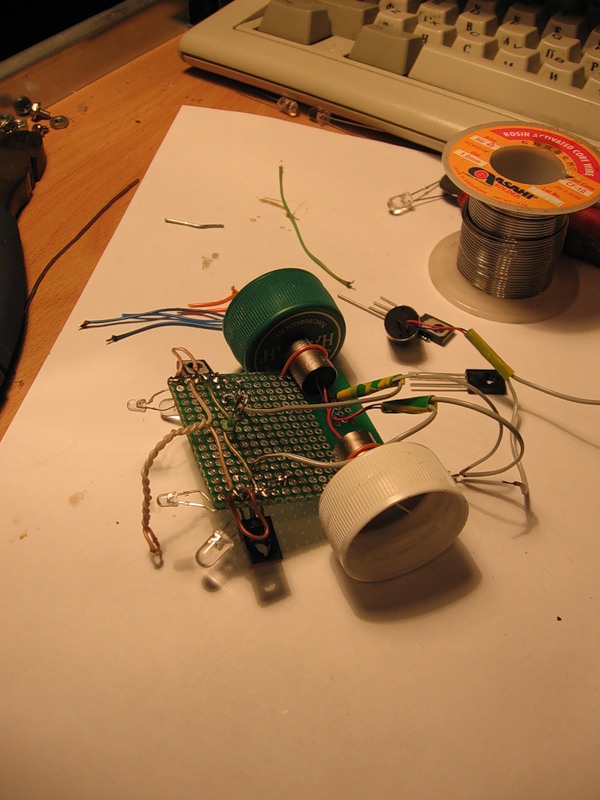
それで、私たちはすべての詳細を取り出して机の上に置きました。 はんだごてはすでにロジンでくすぶっているので、あなたは手を組み立てて欲しがっています-それでは始めましょう。 私たちはインストールの一部を取り、将来のロボットのサイズにカットします。 PCBの切断には、金属用のハサミを使用します。 辺が約4〜5 cmの正方形を作りましたが、主なものは、悲惨な回路がその上に収まること、2つのエンジンバッテリー、および前輪の留め具です。 ボードがガタガタにならないように、さらにはファイルで処理し、鋭いエッジを削除できます。 次のステップは、センサーを密閉することです。 フォトトランジスタとフォトダイオードにはプラスとマイナス、つまりアノードとカソードがあります。 それらの包含の極性を観察する必要があり、これは簡単なテスターで簡単に決定できます。 間違えた場合、何も燃えませんが、ロボットは運転しません。 センサーは、横向きに見えるように、回路基板の片側の角にはんだ付けされています。 それらをボードに完全にはんだ付けする必要はありませんが、任意の方向に簡単に曲げることができるように約1.5センチメートルの結論を残してください-将来的にはロボットをセットアップするときにこれが必要になります。 これらは私たちの目であり、私たちのシャーシの片側にあるはずです。これは将来ロボットの前になります。 すぐに2つの制御回路を収集していることに気付くことができます。1つは右側を制御するため、もう1つは左側のエンジンを制御するためです。

はんだ付けされた光センサーとトランジスタ
シャーシの前端から少し外れて、センサーの隣にトランジスタをはんだ付けする必要があります。 さらなる回路の密閉と組み立ての利便性のために、右ホイールに向かってマーキングした「見た目」で両方のトランジスタを密閉しました。 すぐに、トランジスタの脚の位置に注意する必要があります。 トランジスタを手に取り、金属基板を手前に向けて、森に向かってマークを付けて(おとぎ話のように)脚を下に向けると、脚はそれぞれ左から右になります:ベース、コレクター、エミッター。 トランジスタが示されている図を見ると、ベースは円の太い部分に垂直な棒、エミッタは矢印の付いた棒、コレクタは矢印のない同じ棒になります。 ここではすべてが明らかなようです。 バッテリーを準備し、電気回路の直接組み立てに進みます。 最初は、3本のフィンガーバッテリーを取り出して、直列にはんだ付けしました。 バッテリー用の特別なホルダーにそれらをすぐに挿入することができます。バッテリーは、すでに述べたように、古い子供の車から引き抜かれています。 次に、ワイヤをバッテリーにはんだ付けし、ボード上のすべてのワイヤが収束する2つの重要なポイントを決定します。 プラスとマイナスになります。 ボードの端にツイストペアを挿入し、トランジスタとフォトセンサーの両端を密閉し、ツイストループを作成してバッテリーをはんだ付けしました。 おそらく最良の選択肢ではありませんが、最も便利です。 さて、私たちはワイヤーを準備し、ロボットの電気部品の組み立てに進みます。 電気回路全体を通して、バッテリーの正極から負極接点に進みます。 ツイストペアを取り出して、両方の光センサーのプラスの接点をバッテリーのプラスにはんだ付けし、トランジスタのエミッターを同じ場所にはんだ付けします。 フォトセルの2番目の脚をトランジスタのベースに小さなワイヤではんだ付けします。 トランスユークの残りの最後の脚は、それぞれエンジンにはんだ付けされています。 スイッチを介したモーターの2番目の接点は、バッテリーにはんだ付けできます。
しかし、真のジェダイとして、適切なサイズのスイッチがビンになかったため、ワイヤーをはんだ付けしてはんだ付けしてロボットの電源を入れることにしました。
電気技師のデバッグ
これで、私たちが組み立てた電気部品は、回路のテストを始めましょう。 回路の電源を入れ、点灯しているテーブルランプに持ち込みます。 次に、いずれかのフォトセルを回します。 そして何が起こっているのかを見てください。 照明に応じてエンジンが異なる速度で順番に回転し始めた場合、すべてが正常に動作しています。 そうでない場合は、アセンブリ内の枠を探します。 エレクトロニクスは接触の科学です。つまり、何かが機能しない場合、どこにも接触がないということです。 重要なポイント:右の光センサーは左のホイールを、左は右のホイールを担当します。 ここで、左右のエンジンがどちらの方向に回転するのか疑問に思います。 両方とも前方にスピンするはずです。 これが起こらない場合は、逆方向にモーター端子のワイヤをはんだ付けするだけで、間違った方向に回転しているエンジンをオンにする極性を変更する必要があります。 シャーシ上のモーターの位置をもう一度評価し、センサーが取り付けられている方向の移動方向を確認します。 すべてが順調であれば、次に進みましょう。 いずれにしても、すべてが完全に組み立てられた後でも、これは修正できます。
デバイスの組み立て
私たちは、退屈な電気部品を見つけたので、今度はメカニズムに取りかかりましょう。 キャップ、ペットボトルから車輪を作ります。 前輪を作成するには、2つのキャップを取り、それらを接着します。
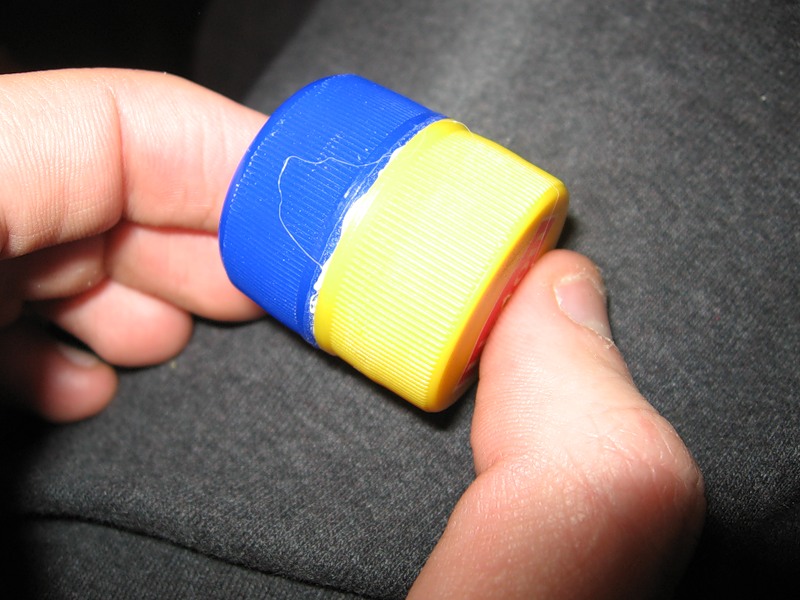
未来の前輪
ホイールの安定性を高めるために、中空部分を内側にして周囲に沿って接着しました。 さらに、カバーの中央に正確に、1番目と2番目のカバーに穴を開けます。 ドリルやあらゆる種類のホームクラフトには、ドレメル、多数のノズルを備えた一種の小さなドリル、フライス加工、取り外し可能など、非常に便利です。 すでに従来のドリルでは対応できない1ミリメートル未満の穴を開けるために彼女が使用することは非常に便利です。
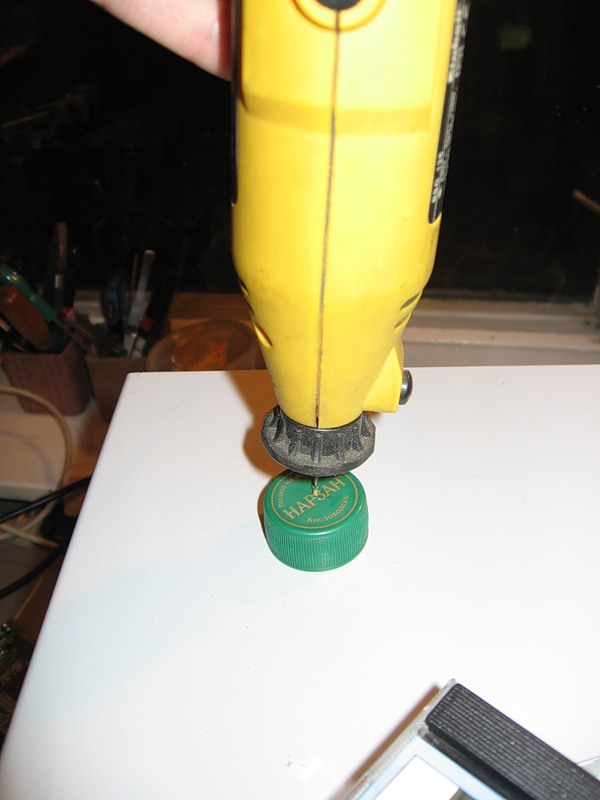
軸の穴あけ
カバーに穴を開けた後、あらかじめまっすぐに伸ばしたペーパークリップを穴に挿入します。

クリップ、CEP-フロントシャーシベース
クリップを文字「P」の形に曲げます。文字の上部のバーにホイールがぶら下がっています。

ペーパークリップを曲げる
次に、このクリップを車の前のフォトセンサー間に固定します。 このクリップは、前輪の高さを簡単に調整できるという点で便利です。この調整については後で説明します。
駆動輪に移りましょう。 また、それらをカバーから作成します。 同様に、各ホイールを厳密に中央にドリルします。 ドリルがモーター軸のサイズであることが最適であり、理想的には、軸がそこに挿入されるようにわずかに1ミリメートル小さくなりますが、困難です。 両方のホイールをエンジンのシャフトに装着し、外れないように、ホットグルーで固定します。

ホットグルーで軸を固定します

完成したホイール
これは、ホイールが移動中に飛び散ったり、留め具の位置で回転したりしないようにするためだけではありません。
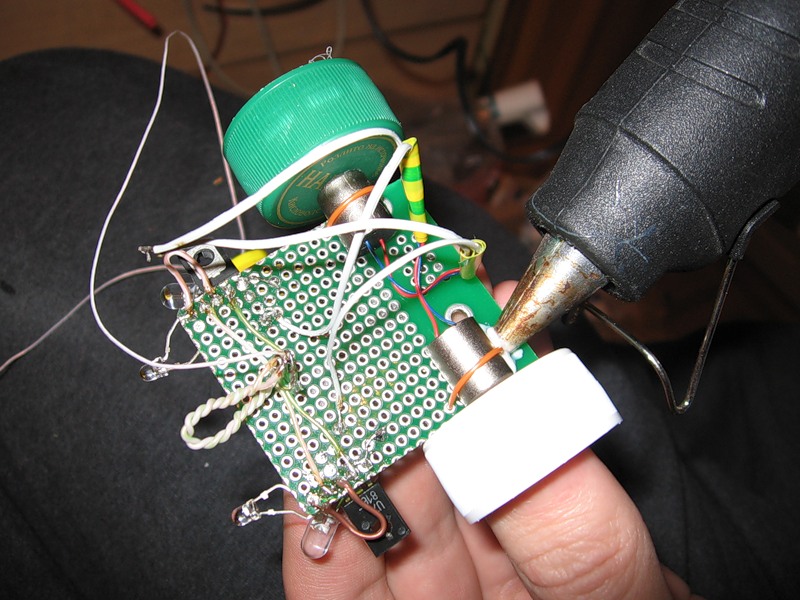
最も重要な部分は、電気モーターの固定です。 シャーシの最後の、回路基板の反対側に、残りの電子機器と比較してそれらを取り付けました。 制御されたエンジンは、制御写真システムの反対側に配置されることに注意してください。 これは、ロボットが光に変わることができるように行われます。 右側は光センサー、左側はエンジン、そしてその逆です。 そもそも、配線の穴にねじ込まれ、上からねじられたツイストペア部品でエンジンをインターセプトします。
ロボットのパイロットバージョン、正しいアセンブリをチェックします
私たちは電力を供給し、エンジンの回転する場所を探します。 暗い部屋では、エンジンは回転しません。ランプに向けることをお勧めします。 すべてのエンジンが実行されているかどうかを確認します。 ロボットを回転させ、照明に応じてエンジンが回転速度を変える様子を観察します。 右の光センサーを回してみましょう。左のエンジンは賢く回転し、もう一方は-反対に、減速します。 最後に、ロボットが前進するように車輪の回転方向を確認します。 説明したように、すべてが機能する場合は、ホットメルト接着剤でエンジンを静かに固定できます。
ホイール固定
車輪が同じ軸上にあることを確認しようとします。 それだけです-バッテリーをシャーシの上部プラットフォームに固定し、ロボットでセットアップとゲームに行きます。
落とし穴とチューニング
私たちのクラフトの最初の落とし穴は予想外でした。 回路全体と技術部分を組み立てたとき、すべてのエンジンは光に非常によく反応し、すべてがうまくいっているように見えました。 しかし、私たちがロボットを床に置いたとき、彼は私たちと一緒に行きませんでした。 モーターの力だけでは不十分であることが判明しました。 より強力なエンジンをそこから得るために、私は子供の車を緊急に解体しなければなりませんでした。 ところで、おもちゃからモーターを使用する場合、バッテリーを搭載した多くの車を運ぶように設計されているため、モーターで動力を失うことはありません。 エンジンを見つけたとき、化粧品の外観を設定して駆動しました。 最初に、床に沿って引きずるワイヤーのひげを集め、ホットメルト接着剤でシャーシに固定する必要があります。

最終的なタッチとアライメント
ロボットが腹で引きずられている場合は、固定ワイヤを曲げてフロントシャーシを上げることができます。 最も重要な光センサー。 メインコースから30度離れた場所でそれらを曲げることが最善です。 それから彼は光源を拾い、それらに行きます。 希望の曲げ角度は実験的に選択する必要があります。 それだけです。テーブルランプを用意し、ロボットを床に置き、電源を入れて、子供が光源をはっきりとたどり、彼が巧みにそれを見つける方法を確認し、喜んでください。
機能強化
完璧さに制限はなく、ロボットでは無限に機能を追加できます。 コントローラーをインストールするという考えさえありましたが、その場合、製造のコストと複雑さが時々増加し、これは私たちの方法ではありません。
最初の改善点は、指定されたパスに沿って移動するロボットを作成することです。 ここではすべてが単純で、プリンタに黒いバーが印刷され、または同様に紙に黒い永久マーカーで描かれています。 主なことは、ストリップが密封された光センサーの幅よりも少し狭くなければならないということです。 フォトセル自体を下げて、床を見るようにします。 それぞれの目の横に、抵抗が470オームの超高輝度LEDを直列に取り付けます。 抵抗のあるLED自体は、バッテリーに直接密閉されています。 アイデアはシンプルです。光は白い紙から美しく反射し、センサーに当たり、ロボットは直進します。 ビームが暗いストリップに当たるとすぐに、フォトセルに光がほとんど入らず(黒い紙が光を完全に吸収します)、したがって、1つのエンジンがよりゆっくりと回転し始めます。 別のモーターが活発にロボットを回転させ、コースを水平にします。 その結果、ロボットはレール上にあるかのように黒い帯に沿って転がります。 このようなストリップを白い床に描いて、コンピューターからビールを得るためにロボットをキッチンに送ることができます。
2つ目のアイデアは、さらに2つのトランジスタと2つの光センサーを追加することで回路を複雑にし、ロボットが正面だけでなくすべての側面からも光を探すようにすることです。 すべては、光源がどちらの側に現れるかだけに依存します。光源が正面にある場合は前方に進み、背後にある場合はロールバックします。 この場合でも、アセンブリを簡素化するためにLM293Dチップを使用できますが、約100ルーブルの費用がかかります。 しかし、それを使用すると、車輪の回転方向、またはより単純にロボットの移動方向の差分包含を簡単に構成できます:前後。
最後にできることは、永久に切れたバッテリーを取り外して太陽電池を入れることです。これは、携帯電話のアクセサリー店(または方言の極端)で購入できます。 このモードでロボットの容量が完全に失われないようにするために、誤って影に落ちた場合、太陽電池を並列に接続することができます-非常に大きな容量の電解コンデンサ(数千マイクロファラッド)。 そこの電圧は5ボルトを超えないため、コンデンサは6.3ボルトで計算できます。 このような容量と電圧は、非常に小さなものになります。 コンダーは、古い電源から購入するか、根こそぎにすることができます。
可能なバリエーションの残りは、あなた自身を考えることができると思います。 何か面白いものがあれば-必ず書いてください。
結論
そこで、私たちは最大の科学である進歩の推進者であるサイバネティックスに参加しました。 前世紀の70年代には、そのようなロボットを設計することは非常に人気がありました。 私たちの作成では、デジタルテクノロジーの出現で消滅したアナログコンピューティングテクノロジーの基礎が使用されていることに注意してください。 しかし、この記事で示したように、すべてが失われるわけではありません。 このような単純なロボットの構築にとどまらず、新しいデザインを思いつき、興味深い工芸品に驚かされることを願っています。 アセンブリで頑張ってください!
わずかに異なるバージョンのこの記事は、Hackerの109号に掲載されており、Habréに投稿するかどうかを多くの時間を考えました。 しかし、私はまだ決心しており、雑誌のレイアウトは好きではないので、Habrに合わせて書き直して適合させた他の写真、わずかに異なるテキストで公開することにしました。
残念ながら、ロボット自体がすでに生きているかのように、ロボットの動作のビデオはありません。 だから、写真だけで満足する必要があります。