まず、私が訪れた結果を示したいと思います。


デバイスは鉄で組み立てられ、完全に動作します。 もちろん、認識確率は非常に低いですが、そのようなデバイスではこれはすでに大きな成果です-そのコアは、20 MHzの周波数でDSP命令のない8ビットATMega88マイクロコントローラーであることを思い出します。 デバイスは2つのチームを認識します(チームの数は数十に拡張でき、リソースが許可されます)。一方は電源負荷をオンにし、もう一方は電源をオフにします。 さらに、IRリモコンからロードのオン/オフを切り替えることができます。 このデバイスは、最大250V / 8Aのスイッチングが可能です。
ほとんどの場合、安価で低消費電力の汎用マイクロコントローラーでこのようなDSPアルゴリズムを実装できるかどうかを確認するために、学術的な関心から設計しました。 結果は非常に満足のいくもので、デバイスは私の場所で24時間365日稼働しています。
低電力マイクロコントローラを使用することの妥当性について話す場合、簡単に言います:原則として、しない方が良いです)
このようなタスクには、dsPICラインの一部のジュニアチップがより適しています。16ビットDSP命令はAVRkiと同じくらい安価で、同じ数のレッグが付属しています。 またはMSP430F2xxxラインからTIから何か
しかし、私のように、AVRから絞り出すことができるものにも興味がある場合は、この記事が役立ちます。
回路
電気回路の開発から始めて、それから必要なものを理解してみましょう。
また、次のものが必要です。
1)220vからの電源。 原則として、少なくともバッテリーから電力を供給することができますが、手元に220ボルトがあれば、そこから電力を取り出すというより論理的な決定を下すことができます。
2)5Vからの制御による220V / 5Aのスイッチング負荷。 私はアンペアを手に取った、5Aはすでにキロワット消費でいくつかのやかんに電力を供給するのに十分である。 または、100ワットの白熱電球が12個ある場合)
3)音声に障害が発生したり、ノイズを発生させたくない場合に備えて、追加の管理機関が望ましい。
4)選択したパラメーターでサウンドをキャプチャします。 パラメーターについては少し後で。
最初のポイントは簡単です-あなたが知っている電源を置くことができます 回路の消費は非常に少ないです。 しかし、以来 24時間365日オンになっているので、220Vを12Vに変換するTPG-0.7トランス、ダイオードブリッジ、平滑コンデンサ、安定した5Vと9Vを提供する2つの線形電圧安定器で構成されるシンプルで信頼性の高い半波トランス電源ユニットを選択しました。
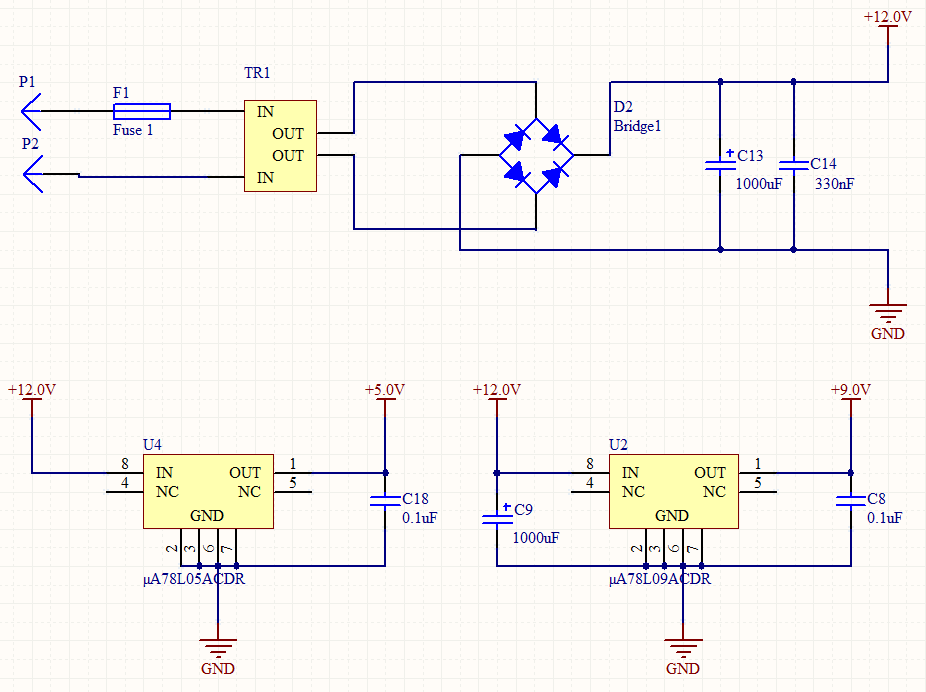
もちろん、5Vの電力はデジタル回路に送られます。 しかし、アナログ部分に9Vが必要でした。 LM324オペアンプが発行できる最大電圧は、Epit-1.5ボルトに相当します。 5Vから給電されている場合、3.5の最大出力が得られることを計算するのは難しくありませんが、これは私には不適当でした。
ポイント2に進みます。 負荷を切り替えるために、信頼性が高く実績のあるソリッドステートリレーS202S02を選択しました。これは、最大250Vh8Aを切り替えることができます。
機械部品は含まれていません。スイッチング回路は非常にシンプルです。リレーには4つのピンがあり、負荷への2つのピンがあり、「通常は開いた」状態になっています。 制御ピンログ1に適用すると、リレーが閉じて電流が流れます。
ポイント3も簡単です。 TSOP1736統合IRセンサーは、それぞれ2つのピンで地面と5V電源に接続し、3番目からログを発行する小さな3本足の奇跡です。 入力信号がない場合は1、入力信号が検出された場合は0を記録します。 入力信号は、ほとんどのIRリモートの搬送波に近い36 kHzの搬送周波数を持つ変調IR放射です。 変調により、TSOPは外部のIRノイズや太陽光などの一定の光から非常によく保護されます。
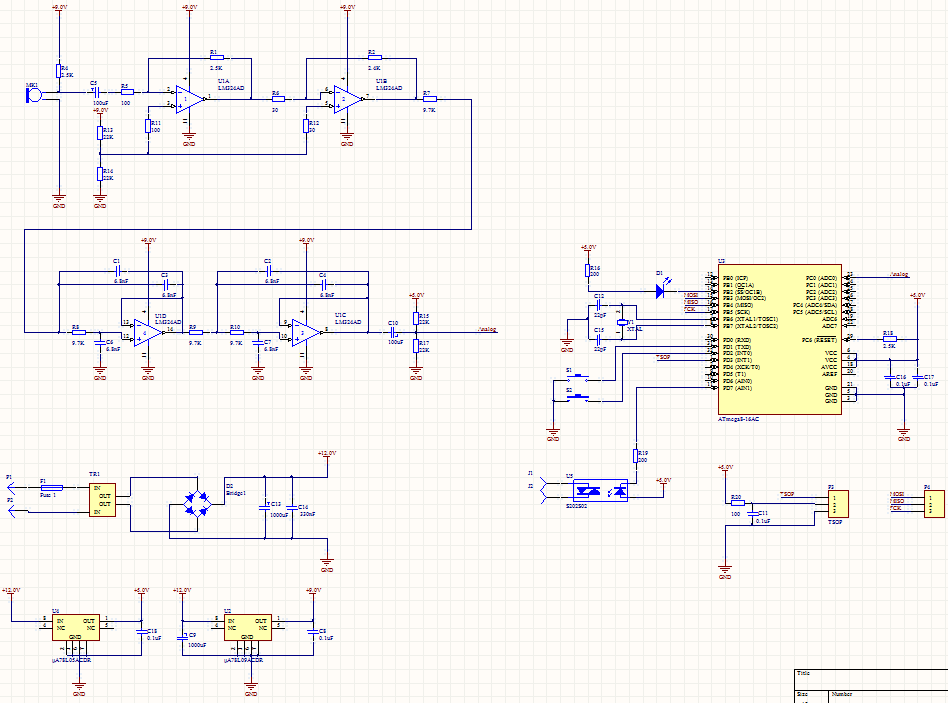
最も興味深い部分であるオーディオキャプチャの部分に移ります。 開発したスキームをすぐに提示します。
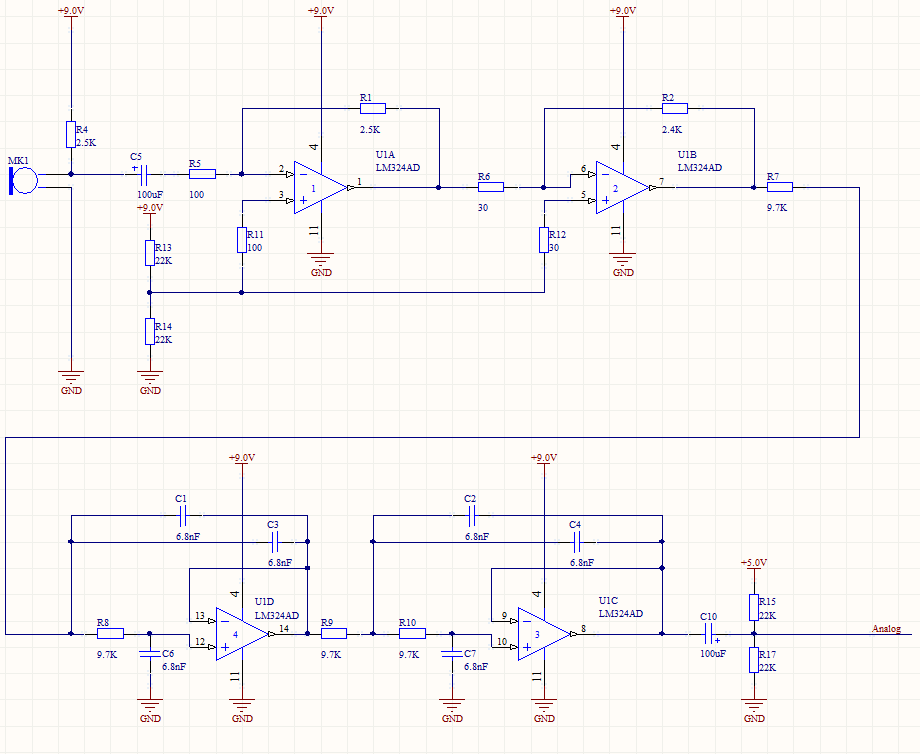
それで、私が言ったように、アナログ部分は9ボルトから給電されます。 このスキームは、オペアンプのユニポーラインクルージョンに特化したTexas Instrumentsの注釈に基づいています。 オペアンプとして、彼はペニー「クアッドコア」オペアンプであるLM324を選択しました。 10ルーブル以下でどこでも購入できるため、アナログ部品全体が単一のチップ上に構築されます。
抵抗器R4を介して供給されたエレクトレットマイクからの信号は、デカップリングコンデンサを介してプリアンプの入力に到達し、次にアンプ(回路の上部の "フロア")に到達します。 アンプは反転ユニポーラ回路でオンになるため、分圧器からの供給電圧の半分が非反転入力に印加されます。
最初のアンプの後、25倍に増幅され、4.5ボルトシフトされた反転信号が得られます。 2回目(その前のコンダーは必要ありません。「グランド」は既に信号をシフトしたのと同じ4.5ボルトであるため)、入力信号は再び反転され、さらに80倍に増幅されます。
2つのカスケードの合計ゲインは2000です。 4ボルトの信号が電源電圧の半分だけシフトしたADCの前に、2 mVのマイクからのバイポーラ信号が現れます。 必要なもの。
特定のマイクのゲインを選択しました-もちろん、出力が2 mVではなく20である場合、ゲインを下げる必要があります。 また、チューニング抵抗器を完全にはんだ付けし、必要に応じてゲインを変更できます。
回路の2番目の「フロア」は、2次のSalen-Kayトポロジーに従って作成された2つのアンチエイリアシングフィルターです。 音声信号は主に低周波数にあるため、5KHzのサンプリング周波数を選択しました。これにより、最大信号周波数は2500Hzになります。 フィルターは約2KHzの周波数に調整されており、4次と組み合わせて、優れたアンチエイリアスフィルタリングを提供します。
最後のステップでは、C10コンデンサーでアンプからの4.5V DCを切り取り、新しい2.5V DCコンポーネントを追加して、コントローラーのADCをキャプチャします。これは、もちろん5Vで駆動され、0〜5Vの範囲の信号を待ちます。
回路の最後の部分は、バインディングのあるコントローラーです。
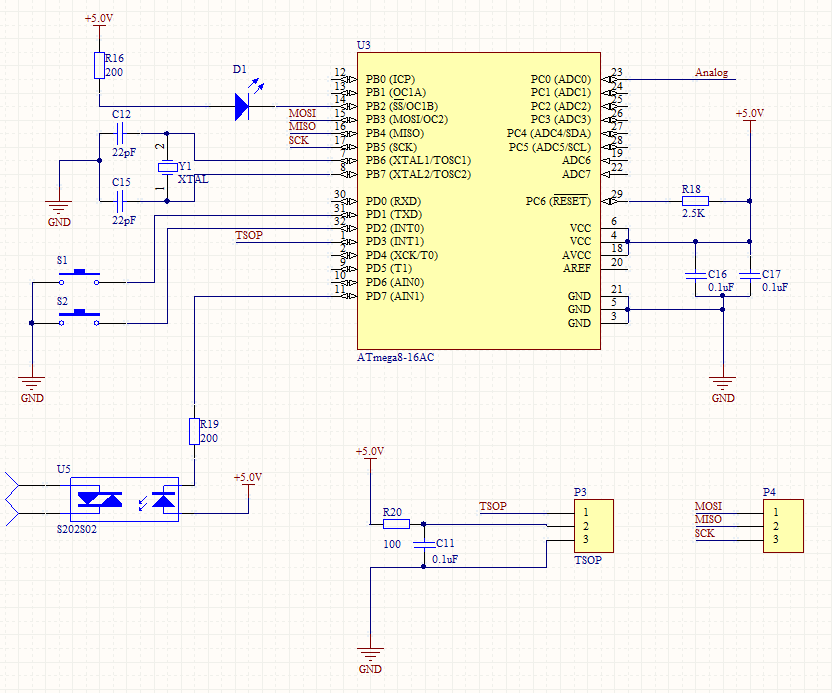
また、TSOP1736、電源リレー、一対のコントロールボタン(私はプロジェクトで使用したことはありません)、インジケーターダイオード、プログラミングポートも示しています。
スキーム全体は次のようになります。
回路図開発結果
開発されたプラットフォームは、さまざまなDSP実験に非常に便利であることが判明しました。
アナログ部品とデジタル部品については、テストと使用のすべての期間に苦情はありませんでした。 しかし、電源の場合、私は少し間違えました-12Vの変圧器を使用すると、定格負荷(約100 mA)で12ボルトを生成することを考慮しませんでした。 そして以来 回路の消費電力ははるかに少なく、トランスは12ボルトではなく約15ボルトを生成します。これが、線形安定装置、特に5Vの安定装置が加熱する理由です。 十数個がそれに落ちます。
それ以外の場合、回路は非常に成功したことが判明し、プロジェクトでよく似たアナログ部品を使用します。 コントローラーは20 MHzで巻き上げられ、サンプリング周波数は5 KHzであるため、デジタル信号処理のクロックサイクルは4000です。
これですべてです。記事の次の部分では、実装した認識アルゴリズムについて説明します。 時間を節約するために、純粋なアセンブラーで実装されたので、準備をしてください)