ドローンの群れは、クラッシュサイトでWiFiを上げます
自然災害または人為的災害の結果を排除するEMERCOMおよび救助サービスの作業において、重要な要素は信頼できるコミュニケーションです。 ただし、衛星電話のみが機能する非常に遠隔地で災害が発生する場合があります。 グループ全体で通常のネットワークを構築する方法は?
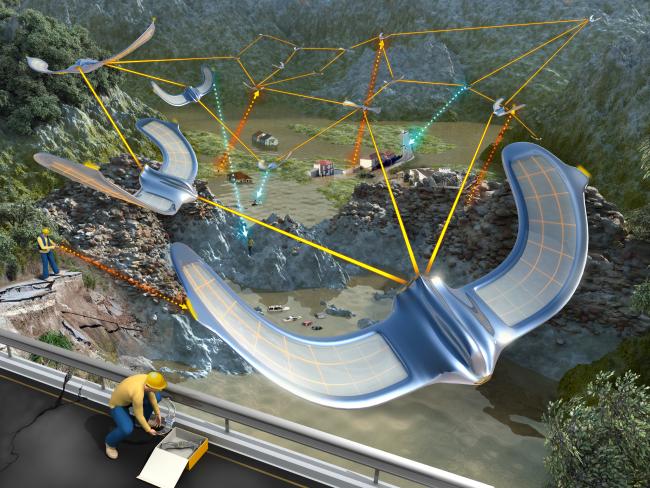
ローザンヌ工科大学の自己調節システムの研究室は、この問題を解決するべきSMAVNETプロジェクト( Swarming Micro Air Vehicle Network)を開発しました 。 彼らは、10台の無人航空機の群れネットワークを使用することを提案します。数分で、広大な地域で無線ネットワークを編成します。 それらを空中に放り込むだけで十分です(ハブラカットの下でのネットワーク展開プロセスのビデオ撮影)。
このようなシステムの利点は、その迅速な展開時間、広いカバレッジ半径、低コストの機器、起動の容易さです(プロトコルは、素人でも簡単にネットワークを開始できるように設計されています)。
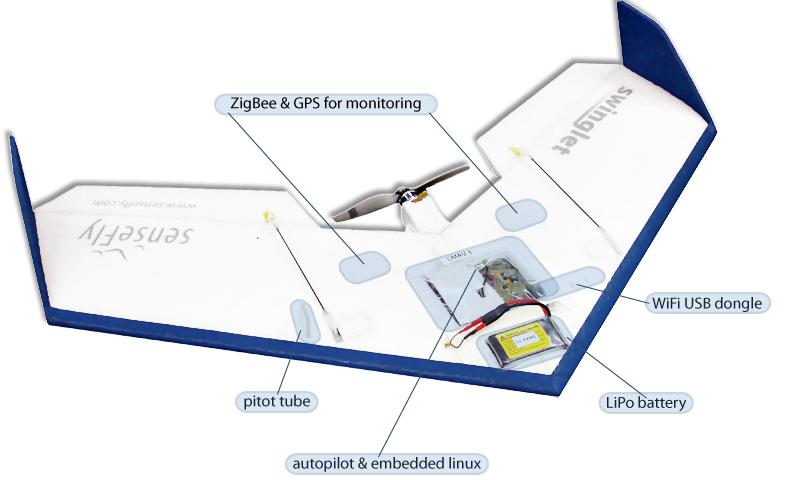
各ロボットは軽量のポリプロピレン製で、重量は420 g、翼幅は80 cmです。
翼の標高は、航空機を制御するために使用されます。 電気モーターは背面に固定されており、リチウムポリマーバッテリーは30分のバッテリー寿命を持ちます。 自動操縦は、高度、速度、旋回半径を制御します。 オートパイロットに組み込まれたマイクロコントローラーは、最小限の戦略を使用して、ジャイロスコープと2つの圧力センサーの3つのセンサーからのみデータを受信します。 ドローンコントローラーは、Linuxを実行するToradex Colibri PXA270ボードで作成されます。 ドローンの軌跡を記録するには、GPSモジュールとZigBee送信機(XBee PRO)が必要です。

最初のビデオでわかるように、WiFiネットワークを展開するには、ドローンをオンにして空中に放り込むだけです。 着陸は地上インターフェースから開始する必要があります。
2番目のビデオでは、ドローンの群れ(アリから借りた)の通信アルゴリズムについて説明しています。
ローザンヌ工科大学の自己調節システムの研究室は、この問題を解決するべきSMAVNETプロジェクト( Swarming Micro Air Vehicle Network)を開発しました 。 彼らは、10台の無人航空機の群れネットワークを使用することを提案します。数分で、広大な地域で無線ネットワークを編成します。 それらを空中に放り込むだけで十分です(ハブラカットの下でのネットワーク展開プロセスのビデオ撮影)。
このようなシステムの利点は、その迅速な展開時間、広いカバレッジ半径、低コストの機器、起動の容易さです(プロトコルは、素人でも簡単にネットワークを開始できるように設計されています)。
各ロボットは軽量のポリプロピレン製で、重量は420 g、翼幅は80 cmです。
翼の標高は、航空機を制御するために使用されます。 電気モーターは背面に固定されており、リチウムポリマーバッテリーは30分のバッテリー寿命を持ちます。 自動操縦は、高度、速度、旋回半径を制御します。 オートパイロットに組み込まれたマイクロコントローラーは、最小限の戦略を使用して、ジャイロスコープと2つの圧力センサーの3つのセンサーからのみデータを受信します。 ドローンコントローラーは、Linuxを実行するToradex Colibri PXA270ボードで作成されます。 ドローンの軌跡を記録するには、GPSモジュールとZigBee送信機(XBee PRO)が必要です。
最初のビデオでわかるように、WiFiネットワークを展開するには、ドローンをオンにして空中に放り込むだけです。 着陸は地上インターフェースから開始する必要があります。
2番目のビデオでは、ドローンの群れ(アリから借りた)の通信アルゴリズムについて説明しています。
All Articles