仮想線虫モデルC. Elegans
この記事では、私たちのプロジェクトについてお話ししたいと思います。
このプロジェクトは、C。Elegans線虫の実用的な3次元コンピューターモデル、つまり、相互作用し、物理的環境で考慮される感覚、神経、および筋肉のシステムを含むモデルの作成に専念しています。 このプロジェクトが解決しようとする基本的な問題は、生物学的ニューロンの最新モデルに基づいて、元の生物に近い仮想生物の挙動を再現できるかどうかを調べることです。 上記のように、 C.Elegans (自由生活の線虫)はモデル生物によって撮影されました。 理由は、C。Elegansが最も研究されている多細胞生物であるためです。今日、すべてのニューロンだけでなく、それらの間の接続に関するデータもあります(302ニューロン、5000を超えるシナプス、2000を超える神経筋化合物動きを運ぶ95個の筋肉細胞、全身は959個の細胞で構成されています)。 これに関して、C。Elegans線虫は、研究の可能な対象の1つであるだけでなく、知能の問題の鍵であると思われます。 、および比較的複雑な行動反応のスペクトルと、神経系の相対的な単純さ。 C. Elegansのフル機能のバーチャルコピーを作成すると、非常に複雑な生物の神経系の研究の基礎を築くのに役立ち、また、神経生物学と知識関連分野および人工知能向け。
これまでに以下の結果が達成されました。 筋肉システムとモデルが動作する環境のシミュレーターが作成されます。 これは、接続されたポイントマスとスプリングのシステムの形で構築された物理モデルに基づいています。 後者は、信号強度に比例して運動ニューロンから送信される神経インパルスの信号の作用により低減できます。 モデルを記述する微分方程式系は、重力、摩擦、表面からの支持の反作用などを考慮して、各ステップで数値的に解かれます。 モデルは、ニューロンの座標とそれらの間の関係に関する実験データを使用します。 ニューロンの座標は、C。Elegansのスプリングマッスルフレームと動的に接続されています。 このモデルのフレームワーク内で、各ポイントについて表面に触れる瞬間を記録し、対応する触感細胞検出器に信号を送信し、運動ニューロンの活性化の場合、特定の筋肉を減らすことができます。 現時点では、身体の筋肉システムの動作を制御する運動ニューロン(運動回路)のニューラルネットワークが作成されています。このニューラルネットワークは、すべてのC. Elegansニューロンをカバーするより大きなネットワークのサブネットになります。 現時点では、生きているワームのニューラルネットワークを完全に繰り返すニューラルネットワークを実装しています。
モデル全体はC ++で実装されています。 視覚化はOpenGlを使用して行われます。
ニューロンの名前は、多色の碑文でマークされています。
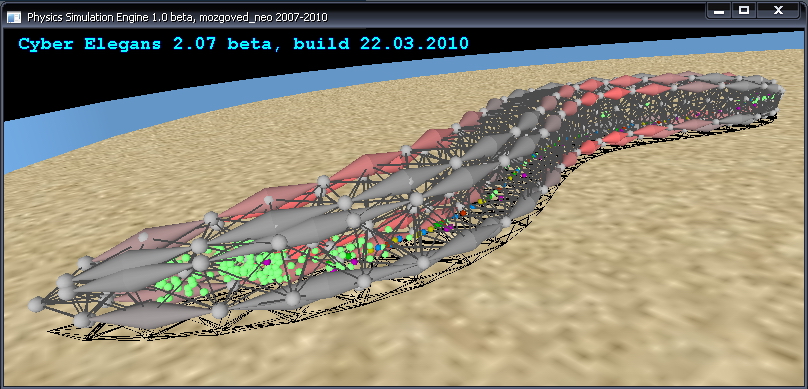
図では、ニューロンは多色の球体で表されています。
このプロジェクトは、A。P. Ershov SB RASにちなんで名付けられたコンピューターサイエンス研究所の複雑なシステムのモデリング研究所で実施されています。 このプロジェクトは、直属のプロジェクトマネージャーであり、私のスーパーバイザーである私とアレクサンダーディバートのパートタイムであるアンドレイユリエビッチパリャノフの3人のチームによって実行されます。
挑戦
このプロジェクトは、C。Elegans線虫の実用的な3次元コンピューターモデル、つまり、相互作用し、物理的環境で考慮される感覚、神経、および筋肉のシステムを含むモデルの作成に専念しています。 このプロジェクトが解決しようとする基本的な問題は、生物学的ニューロンの最新モデルに基づいて、元の生物に近い仮想生物の挙動を再現できるかどうかを調べることです。 上記のように、 C.Elegans (自由生活の線虫)はモデル生物によって撮影されました。 理由は、C。Elegansが最も研究されている多細胞生物であるためです。今日、すべてのニューロンだけでなく、それらの間の接続に関するデータもあります(302ニューロン、5000を超えるシナプス、2000を超える神経筋化合物動きを運ぶ95個の筋肉細胞、全身は959個の細胞で構成されています)。 これに関して、C。Elegans線虫は、研究の可能な対象の1つであるだけでなく、知能の問題の鍵であると思われます。 、および比較的複雑な行動反応のスペクトルと、神経系の相対的な単純さ。 C. Elegansのフル機能のバーチャルコピーを作成すると、非常に複雑な生物の神経系の研究の基礎を築くのに役立ち、また、神経生物学と知識関連分野および人工知能向け。
何をした
これまでに以下の結果が達成されました。 筋肉システムとモデルが動作する環境のシミュレーターが作成されます。 これは、接続されたポイントマスとスプリングのシステムの形で構築された物理モデルに基づいています。 後者は、信号強度に比例して運動ニューロンから送信される神経インパルスの信号の作用により低減できます。 モデルを記述する微分方程式系は、重力、摩擦、表面からの支持の反作用などを考慮して、各ステップで数値的に解かれます。 モデルは、ニューロンの座標とそれらの間の関係に関する実験データを使用します。 ニューロンの座標は、C。Elegansのスプリングマッスルフレームと動的に接続されています。 このモデルのフレームワーク内で、各ポイントについて表面に触れる瞬間を記録し、対応する触感細胞検出器に信号を送信し、運動ニューロンの活性化の場合、特定の筋肉を減らすことができます。 現時点では、身体の筋肉システムの動作を制御する運動ニューロン(運動回路)のニューラルネットワークが作成されています。このニューラルネットワークは、すべてのC. Elegansニューロンをカバーするより大きなネットワークのサブネットになります。 現時点では、生きているワームのニューラルネットワークを完全に繰り返すニューラルネットワークを実装しています。
モデル全体はC ++で実装されています。 視覚化はOpenGlを使用して行われます。
ニューロンの名前は、多色の碑文でマークされています。
図では、ニューロンは多色の球体で表されています。
このプロジェクトは、A。P. Ershov SB RASにちなんで名付けられたコンピューターサイエンス研究所の複雑なシステムのモデリング研究所で実施されています。 このプロジェクトは、直属のプロジェクトマネージャーであり、私のスーパーバイザーである私とアレクサンダーディバートのパートタイムであるアンドレイユリエビッチパリャノフの3人のチームによって実行されます。
All Articles