लॉज़ेन पॉलिटेक्निक संस्थान में स्व-विनियमन प्रणालियों की प्रयोगशाला ने SMAVNET परियोजना (द स्वार्मिंग माइक्रो एयर व्हीकल नेटवर्क) विकसित की है, जिसे इस समस्या को हल करना चाहिए। वे दस मानव रहित हवाई वाहनों के झुंड नेटवर्क का उपयोग करने का सुझाव देते हैं, जो कुछ ही मिनटों में एक विशाल क्षेत्र में एक वायरलेस नेटवर्क को व्यवस्थित करते हैं। यह उन्हें हवा में फेंकने के लिए पर्याप्त है (हैबरकट के तहत नेटवर्क परिनियोजन की प्रक्रिया का वीडियो फिल्मांकन)।
इस तरह की प्रणाली के फायदे इसकी तेज तैनाती समय, विस्तृत कवरेज त्रिज्या, कम लागत वाले उपकरण, लॉन्च में आसानी (प्रोटोकॉल इस तरह से डिज़ाइन किए गए हैं कि एक आम आदमी भी आसानी से नेटवर्क शुरू कर सकता है)।
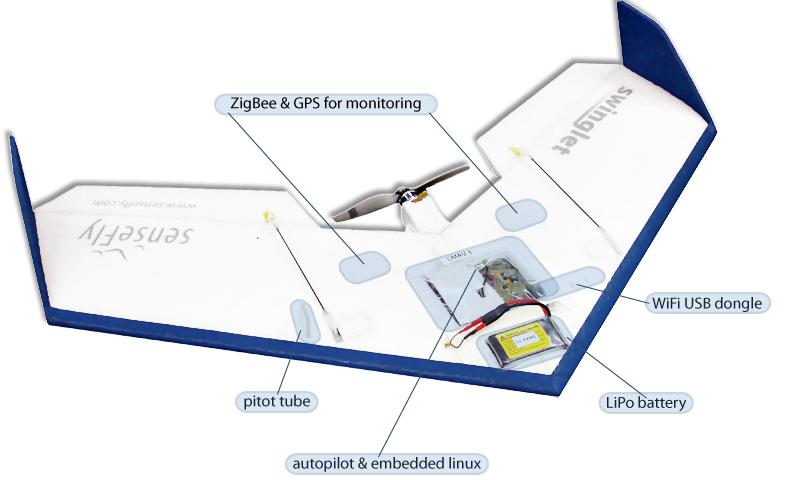
प्रत्येक रोबोट हल्के पॉलीप्रोपाइलीन से बना होता है, जिसका वजन 420 ग्राम, पंख 80 सेमी होता है।
विमानों को नियंत्रित करने के लिए पंखों पर ऊंचाई का उपयोग किया जाता है। इलेक्ट्रिक मोटर को पीछे से तय किया जाता है, लिथियम-पॉलिमर बैटरी 30 मिनट की बैटरी जीवन के लिए रहती है। ऑटोपायलट ऊंचाई, गति और मोड़ त्रिज्या को नियंत्रित करता है। ऑटोपायलट में निर्मित माइक्रोकंट्रोलर एक न्यूनतम रणनीति का उपयोग करता है, केवल तीन सेंसर से डेटा प्राप्त करता है: एक जाइरोस्कोप और दो दबाव सेंसर। ड्रोन नियंत्रक एक टॉरडेक्स कॉलीबरी पीएक्सए 270 बोर्ड पर चल रहे हैं जो लिनक्स पर चल रहे हैं। ड्रोन के प्रक्षेपवक्र को रिकॉर्ड करने के लिए GPS मॉड्यूल और ZigBee ट्रांसमीटर (XBee PRO) की आवश्यकता होती है।

जैसा कि आप पहले वीडियो में देख सकते हैं, वाईफाई नेटवर्क को तैनात करने के लिए, बस ड्रोन को चालू करें और उन्हें हवा में फेंक दें। ग्राउंड इंटरफेस से लैंडिंग शुरू की जानी चाहिए।
दूसरा वीडियो ड्रोन के एक झुंड (चींटियों से उधार) में संचार एल्गोरिदम की व्याख्या करता है।